Định luật điều chỉnh tỷ lệ động cơ điện và quán tính trong bộ truyền động robot
Electric motor scaling laws and inertia in robot actuators
Bài viết này đi sâu vào các định luật tỉ lệ "motor scaling laws" cho các bộ truyền động robot. Nó chỉ ra rằng với cùng một torque đầu ra và mức tiêu thụ năng lượng của motor, các cấu hình motor-hộp số khác nhau sẽ ảnh hưởng đến quán tính phản xạ (reflected inertia). Một điểm nhấn quan trọng là giới thiệu một đại lượng "Figure of Merit" ($FoM$) bất biến với kích thước cho motor, được định nghĩa là $\tau / (r \sqrt{p \cdot m})$. Đại lượng này giúp so sánh các motor ở các quy mô khác nhau và làm nổi bật các giới hạn vật liệu cơ bản. Các developer nên cân nhắc $FoM$ này khi chọn motor, hiểu rằng các lựa chọn thiết kế bộ truyền động ảnh hưởng đáng kể đến hiệu suất động lực học thông qua quán tính, và rằng có những giới hạn vật lý về hiệu quả của motor so với kích thước và khối lượng của nó.
Đây là phần mở đầu của loạt bài viết về hoạt động của robot. Mục đích ở đây không phải là quy định một số kiến trúc hoặc giải pháp cụ thể mà là nói về các nguyên tắc cơ bản, ít thiên vị nhất có thể...
Đây là phần mở đầu của loạt bài viết về hoạt động của rô-bốt. Mục đích ở đây không phải là quy định một số kiến trúc hoặc giải pháp cụ thể mà là nói về các nguyên tắc cơ bản, ít thiên vị nhất có thể. Hy vọng bạn học được điều gì đó.
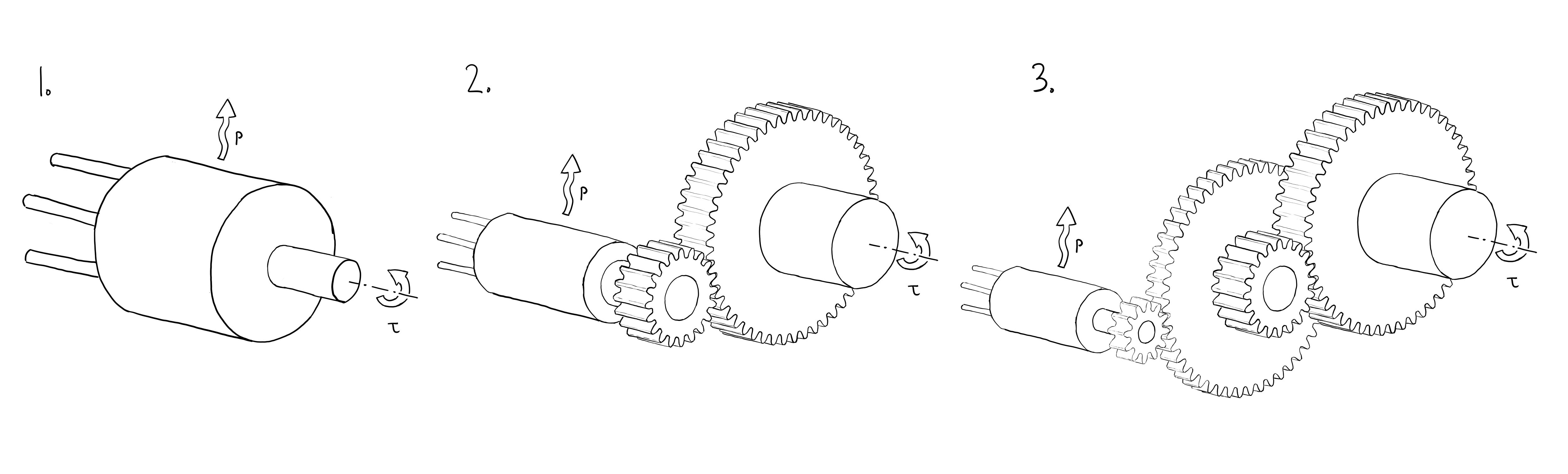
Đây là một câu hỏi có vẻ đơn giản dành cho những ai đã dành thời gian suy nghĩ về bộ truyền động rô-bốt. Hãy nhìn vào ba thiết bị truyền động hoạt hình dưới đây. Một chiếc có động cơ lớn dẫn động trực tiếp, một chiếc có động cơ cỡ trung bình với bộ giảm tốc một cấp và chiếc thứ ba có động cơ nhỏ với bộ giảm tốc hai cấp. Các tỷ số truyền được chọn sao cho các bộ truyền động đều có thể tạo ra cùng một mô-men xoắn đầu ra và tất cả đều có cùng mức tiêu tán điện trở trong động cơ đối với một mô-men xoắn đầu ra nhất định. Giả sử các bánh răng không có khối lượng và hiệu suất 100%.
Bộ truyền động nào trong số này có quán tính phản xạ thấp nhất? Được xác định bằng quán tính rôto nhân với tỷ số truyền bình phương.
Chúng ta sẽ quay lại vấn đề này.
Tỷ lệ động cơ bậc nhất
Làm thế nào để mô-men xoắn, $\tau$, khối lượng, $m$, công suất tiêu tán, $p$, và quán tính rôto, $j$, tỷ lệ với kích thước động cơ? Đối với phân tích này, chúng tôi giả sử độ dày hướng tâm của stato và rôto là không đổi.
Đầu tiên, điều gì xảy ra nếu chỉ có chiều dài $l$, thay đổi, giữ cho mật độ dòng điện trong cuộn dây không đổi (tương đương với việc giữ áp suất cắt từ không đổi)? Điều này khá trực quan – gấp đôi chiều dài của động cơ và mô-men xoắn sẽ tăng gấp đôi, quán tính rôto sẽ tăng gấp đôi và công suất tiêu tán sẽ tăng gấp đôi (bỏ qua các vòng quay cuối): $$\tau, m, p, j \propto l$$
Điều gì sẽ xảy ra nếu chỉ có bán kính $r$, thay đổi, đồng thời giữ mật độ dòng điện trong cuộn dây không đổi?
$$m, p\propto r$$ $$\tau \propto r^{2}$$ $$j\propto r^{3}$$
Một con số đơn giản về thành tích
“Hằng số động cơ”, $K_{m}$, hẳn là một thuật ngữ quen thuộc với bất kỳ ai đã đọc bảng dữ liệu động cơ. Hằng số động cơ, tính bằng đơn vị $\frac{N–m}{\sqrt{watt}}$, mô tả công suất điện trở tiêu hao của động cơ đối với một mô-men xoắn nhất định. Điều này hữu ích khi so sánh các động cơ có kích thước tương tự nhau, nhưng không hữu ích khi so sánh các động cơ có kích thước rất khác nhau, vì việc thay đổi kích thước của động cơ sẽ trực tiếp làm thay đổi $K_{m}$. Sẽ rất hữu ích nếu có một số giá trị bất biến về kích thước.
Hóa ra việc chuẩn hóa $K_{m}$ theo khối lượng và bán kính động cơ là điều đơn giản. “$K_{m}$” được chuẩn hóa này mô tả lực từ có thể tạo ra bao nhiêu cho một khối lượng và công suất tiêu tán nhất định, đồng thời tính ra:
$$FoM = \frac{\tau}{r\sqrt{p \cdot m}} = \frac{K_{m}}{r\sqrt{m}}$$
Con số đáng khen này cũng áp dụng cho động cơ tuyến tính. Loại bỏ mét tính bằng Newton-mét với bán kính trên mẫu số và bạn nhận được:
$$FoM = \frac{F}{\sqrt{p \cdot m}}$$
Thật thú vị khi nghĩ về các giới hạn cơ bản cho FoM này. Trong ví dụ về lực Lorentz cấp vật lý cổ điển này, chúng ta có một dây dẫn có độ dẫn $\sigma$ và mật độ $\rho$ trôi nổi trong từ trường $\vec{B}$.
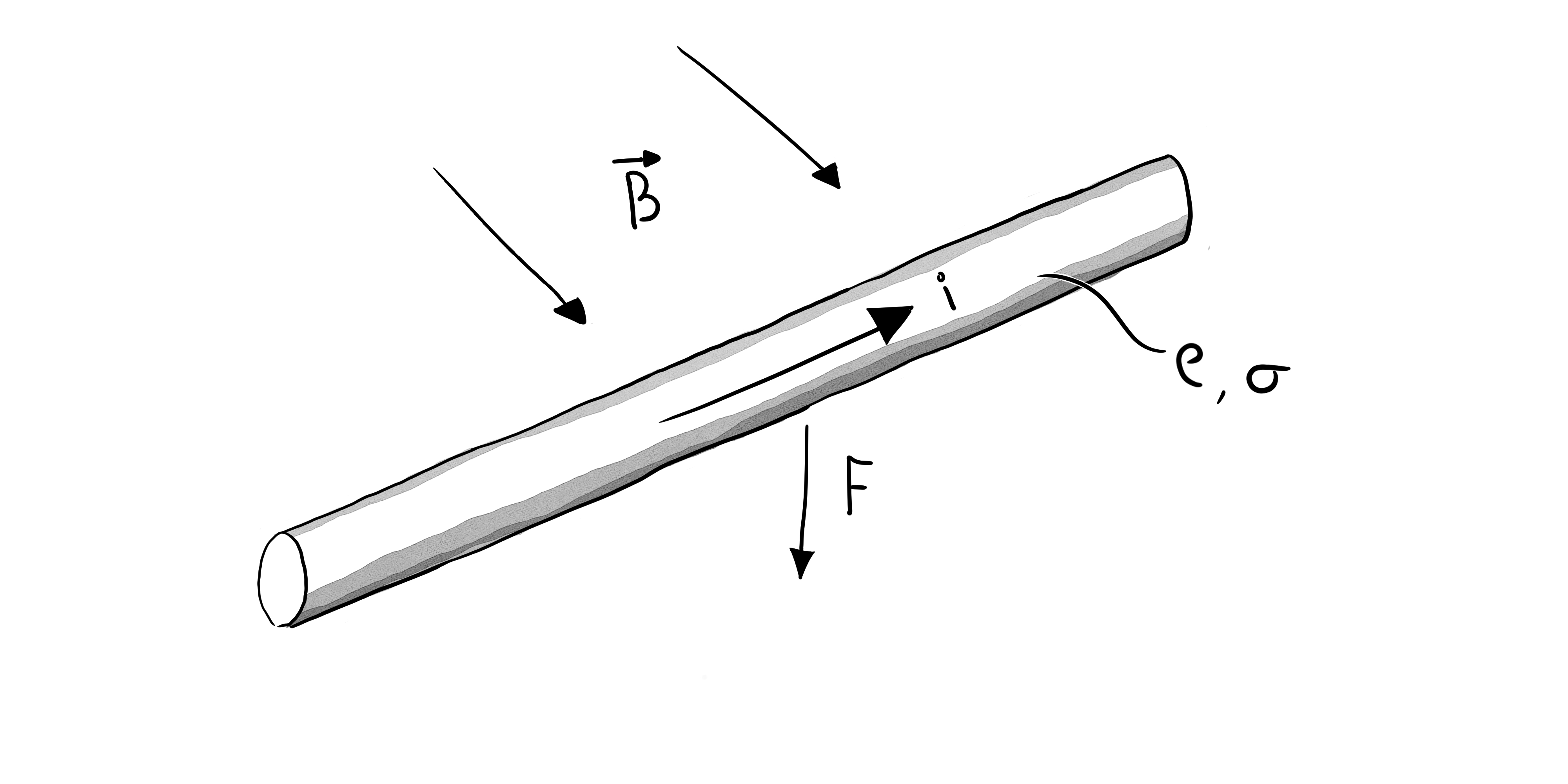
Tất cả độ dài đều bị triệt tiêu, khiến giá trị chỉ là một hàm số thuộc tính vật liệu:
$$FoM = |{B}|\sqrt{\frac{\sigma}{\rho}}$$
Điều này đặt giới hạn trên cho bộ truyền động lực Lorentz ở mức khoảng $82 \frac{N}{\sqrt{kg\cdot watt}}$, nếu dây dẫn là đồng và từ trường xung quanh kỳ diệu là 1T. Có một số cách thông minh để vượt qua giới hạn này trong các thiết kế động cơ thực, nhưng đó là chủ đề của ngày khác.
Bạn cũng có thể tìm thấy phiên bản động cơ tuyến tính và đặc tính vật liệu của các phương trình này trong bài viết này của Bryan Ruddy và Ian Hunter tại MIT.
Vậy, FoM này có hoạt động trong thế giới thực không? Nó có thực sự bất biến với kích thước và khối lượng của động cơ không? Đây là biểu đồ của $K_{M}$ so với khối lượng được chuẩn hóa của một loạt động cơ không khung có sẵn. Động cơ không khung của TQ là một trường hợp điển hình tốt vì chúng có phạm vi kích thước rộng, kỹ thuật xây dựng tương tự trên nhiều kích thước và bảng dữ liệu chính xác.
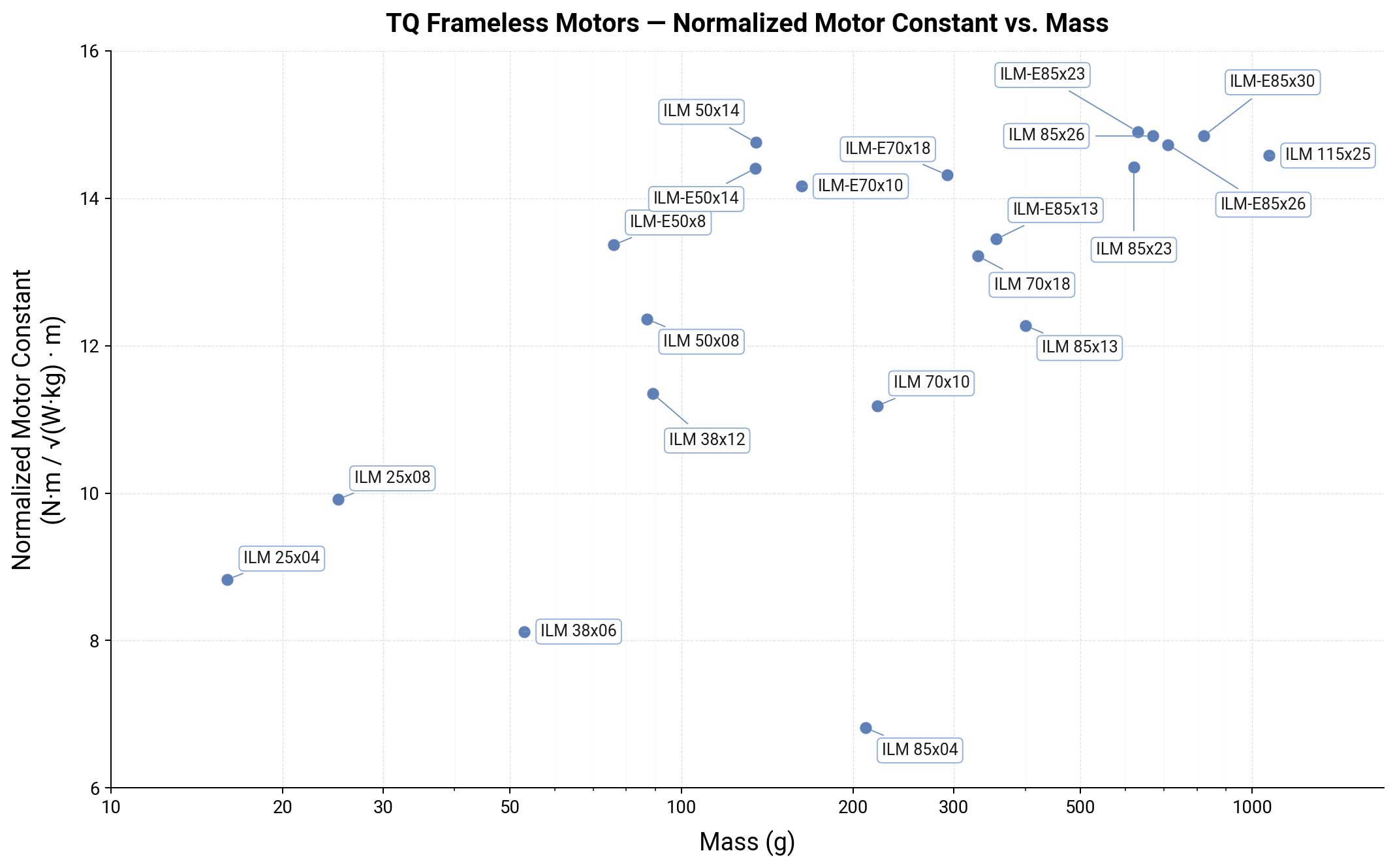
Từ 16 gam đến 1,07 kg, $K_{m}$ chuẩn hóa có phạm vi khoảng 7-15. Có một số động cơ FoM thấp ngoại lệ, nhưng phần lớn danh mục nằm trong khoảng từ 11 đến 15. Động cơ FoM thấp là động cơ có chiều dài ngăn xếp ngắn nhất trong danh mục. Điều này có ý nghĩa: FoM chỉ là hằng số giả định tỷ lệ bậc nhất, nhưng trên thực tế, chiều dài ống khói ngắn hơn có nghĩa là phần điện trở và khối lượng cuộn dây của động cơ ở các vòng cuối cao hơn, đồng thời các tác động cuối khác như từ thông rôto & stato rò rỉ ra khỏi các mặt trục của động cơ trở nên đáng kể hơn.
Kết hợp tỷ lệ, FoM và tỷ số truyền
Giá trị này liên quan như thế nào đến quán tính phản xạ, $j_{ref}$ và tỷ số truyền?
Từ các định luật chia tỷ lệ hình học ở trên $j \propto mr^{2}$. Sắp xếp lại FoM, $\tau \propto r \sqrt{mp}$. Kết hợp những điều này, $\tau \propto \sqrt{jp}$
Trong một bộ truyền động có tỷ số truyền $G$, $\tau_{out} = G\cdot \tau$ và $j_{ref} = G^{2}j$
Vì vậy:
$$j \propto \frac{\tau^{2}}{p},\quad \frac{j_{ref}}{G^{2}} \propto \frac{\tau_{out}^{2}}{G^{2}p}, \quad j_{ref} \propto \frac{\tau_{out}^{2}}{p}$$
Và bạn hãy nhìn vào điều đó, tỷ số truyền đã bị loại bỏ! Với cách chia tỷ lệ được đơn giản hóa này, đối với một mô-men xoắn cố định, quán tính phản xạ chỉ là hàm số tiêu tán năng lượng!
Điều này không trực quan. Sau đây là ví dụ cụ thể.
Thiết bị truyền động 1 dẫn động trực tiếp, có mô-men xoắn đầu ra là 1 N-m, khối lượng 1 Kg, công suất tiêu tán 1 Watt ở 1 N-m và quán tính rôto là 1 $kgm^{2}$.
Thiết bị truyền động 2 có động cơ có đường kính bằng 1/2 và có cùng chiều dài với động cơ trong thiết bị truyền động 1. Ở cùng mức tiêu thụ công suất, động cơ tạo ra $\frac{1}{2\sqrt{2}}$ lần mô-men xoắn, do đó, nó cần tỷ số truyền là $2\sqrt{2}$ để tạo ra cùng một mô-men xoắn ở đầu ra của bộ truyền động. Quán tính của rôto bằng 1/8 quán tính của động cơ trong bộ truyền động 1, vì $j\propto r^{3}$. Quán tính phản ánh sau khi chuyển số là $g^{2}j = \frac{(2\sqrt{2})^{2}}{8}= 1$.
Một trong những các giấy tờ về hoạt động của Cheetah gốc về cơ bản đều nói điều tương tự:
trong một không gian thiết kế nơi khối lượng động cơ và yêu cầu mô-men xoắn liên tục là được giữ không đổi trong khi bán kính khe hở có thể thay đổi tự do và bộ truyền bánh răng không khối lượng và không ma sát được thêm vào để đáp ứng yêu cầu mô-men xoắn, mô-men xoắn đầu ra và tổng quán tính phản ánh không phụ thuộc vào bán kính khe hở và tỷ số truyền tương ứng
Điều này thực sự đúng ngay cả khi khối lượng không được giữ không đổi – mặc dù giả định trong bài báo này là khả năng tản nhiệt là $\propto$ khối lượng, đó là lý do tại sao chúng giữ khối lượng không đổi.
Sử dụng lại dữ liệu động cơ TQ, chúng ta có thể thấy mọi thứ trông như thế nào trong thực tế. Biểu đồ bên dưới cho thấy một bộ thiết kế bộ truyền động có cùng mô-men xoắn đầu ra, các động cơ khác nhau và một loạt các tỷ số truyền. Đối với mỗi động cơ và phạm vi tỷ số truyền, công suất tiêu tán cần thiết để đạt được mô-men xoắn đầu ra và quán tính phản xạ được vẽ. Các động cơ riêng lẻ chỉ được vẽ biểu đồ theo định mức mô-men xoắn cực đại để tất cả các điểm trong biểu đồ đều khả thi.
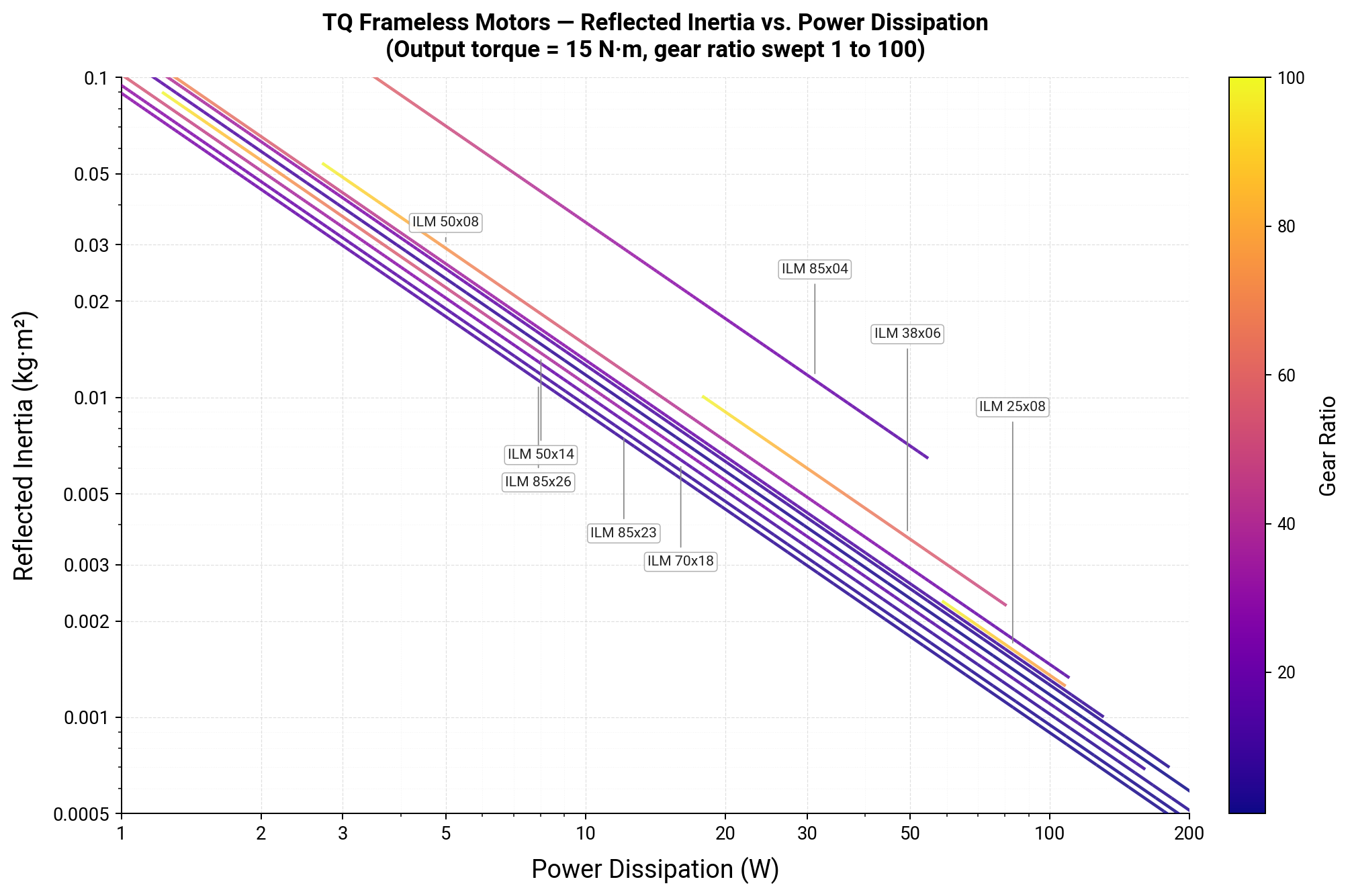
Ngoại trừ các động cơ có chiều dài ngăn xếp ngắn (một lần nữa), không có sự chênh lệch quá lớn giữa toàn bộ danh mục động cơ. Đối với cùng một mô-men xoắn và công suất tiêu tán nhất định, quán tính phản xạ sau khi chuyển số là như nhau trong hệ số khoảng 1,5. Mặc dù tỷ số truyền và khối lượng động cơ thay đổi ~2 bậc độ lớn!
Biểu đồ này gần như có thể được cô đọng hoàn toàn thành một con số duy nhất cho mỗi động cơ, bằng cách sử dụng khối lượng rôto làm khối lượng trong FoM, thay vì khối lượng của toàn bộ động cơ và bán kính rôto làm bán kính trong FoM.
Nhưng còn [outrunners/icular flux/double-side-stator/transverse flux] thì sao?
Nói chung, cấu trúc liên kết động cơ không ảnh hưởng đáng kể đến FoM.
Có những ngoại lệ đối với điều này – động cơ từ thông ngang nói riêng rất thú vị vì chúng không bị ràng buộc bởi giới hạn lực Lorentz trình bày ở trên (mặc dù chúng có những thách thức riêng). Cấu trúc liên kết động cơ có lẽ đáng được đăng trong loạt bài này.
Tại sao động cơ từ thông hướng trục về cơ bản giống như động cơ từ thông hướng tâm? Cả hai đều chỉ là động cơ tuyến tính quấn quanh các trục khác nhau.

(nếu bạn quấn động cơ tuyến tính quanh trục cuối cùng, song song với chuyển động tuyến tính, bạn sẽ nhận được động cơ dạng ống)
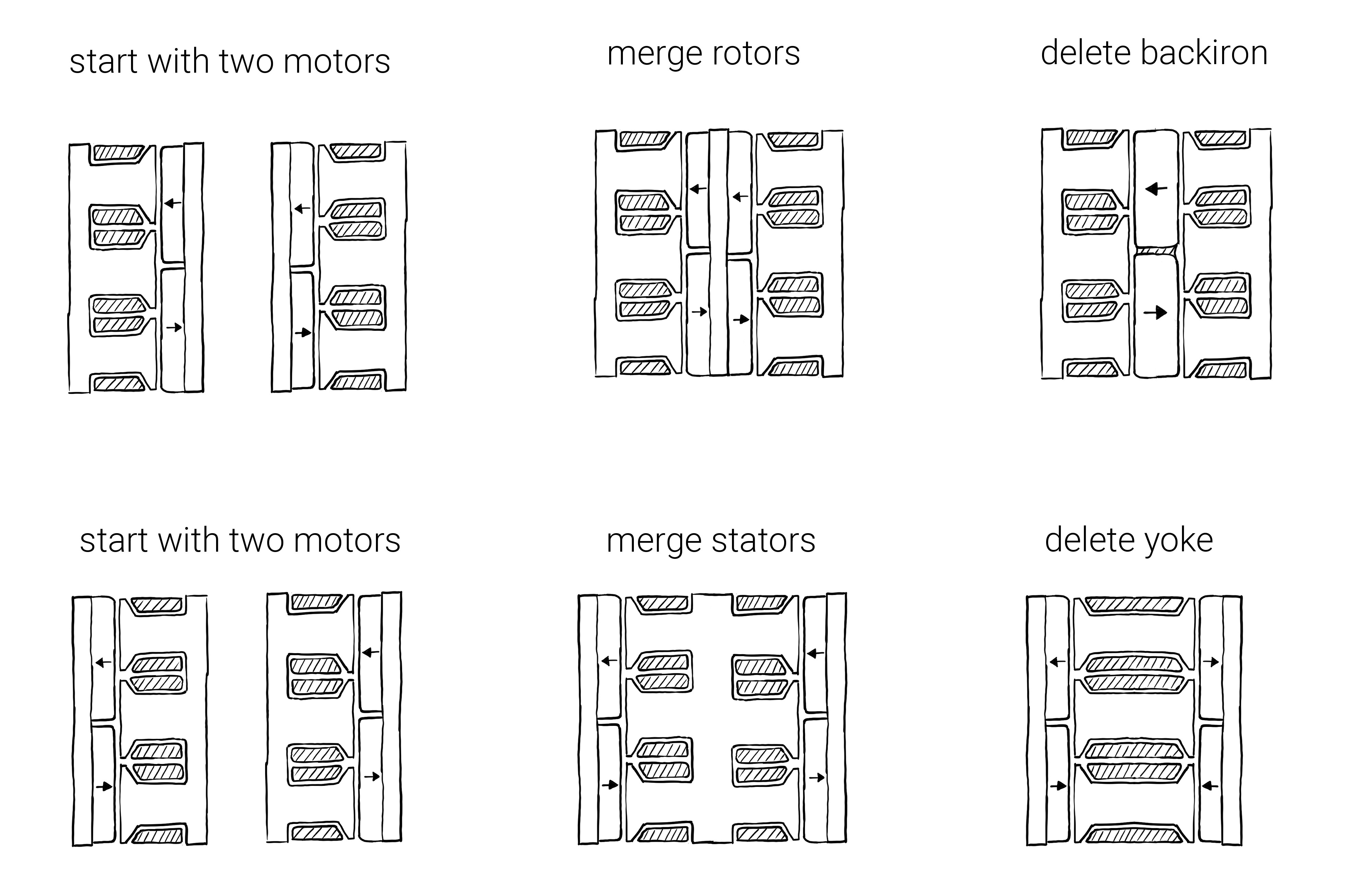
Còn rôto hai mặt thì sao? Rôto hai mặt có cung cấp cho bạn mô-men xoắn gấp đôi và foM gấp đôi không? Xin chúc mừng, bạn đã tạo ra được hai động cơ và gắn chúng lại với nhau! Trong những sự sắp xếp nhất định (ví dụ: YASA), có một lợi thế (và những thách thức về cấu trúc được thêm vào) so với việc gắn hai động cơ lại với nhau theo đúng nghĩa đen, từ việc loại bỏ “ách” của stato (hoặc bệ đỡ rôto, trong động cơ hai stator), do đó có “Không có Yokeless” trong Yokeless And Sphân đoạn Aphần ứng. Điều này có thể có ý nghĩa quan trọng về mặt khối lượng và âm lượng, đặc biệt là trong các động cơ có số cực thấp trong đó ách và bàn ủi sau phải dày.
Lấy EMRAX 208 làm ví dụ về rôto kép, kiểu YASA. Nó có khối lượng gấp 10 lần và đường kính gấp 2 lần động cơ TQ lớn nhất trong các đồ thị trên. Tôi đã tháo rời một động cơ tương tự cách đây một thời gian. Giả định một cách thận trọng rằng bao bì (vỏ, trục vòng bi, v.v.) chiếm 50% tổng khối lượng động cơ (có thể ít hơn nhiều), $K_{m}$ chuẩn hóa sẽ là 13,9. Ngay trong sân chơi của tất cả các động cơ TQ.
Còn thiếu gì?
Đây không phải là thước đo tổng thể. Nó không nói gì về mô-men xoắn cực đại và độ bão hòa, cũng như không nói gì về quán tính của rôto và không nói gì về sự truyền nhiệt.
Người đọc tinh ý có thể nhận thấy rằng trong ví dụ trên, động cơ có bán kính 1/2 phải tiêu tán cùng một lượng công suất, chỉ với 1/2 diện tích bề mặt có sẵn! Ví dụ về động cơ đường kính 1/2 ở trên cũng được điều khiển mạnh hơn về mặt mật độ dòng điện và mật độ từ thông so với ví dụ truyền động trực tiếp – áp suất cắt mà nó cần tạo ra cao hơn $\sqrt{2}$ lần.
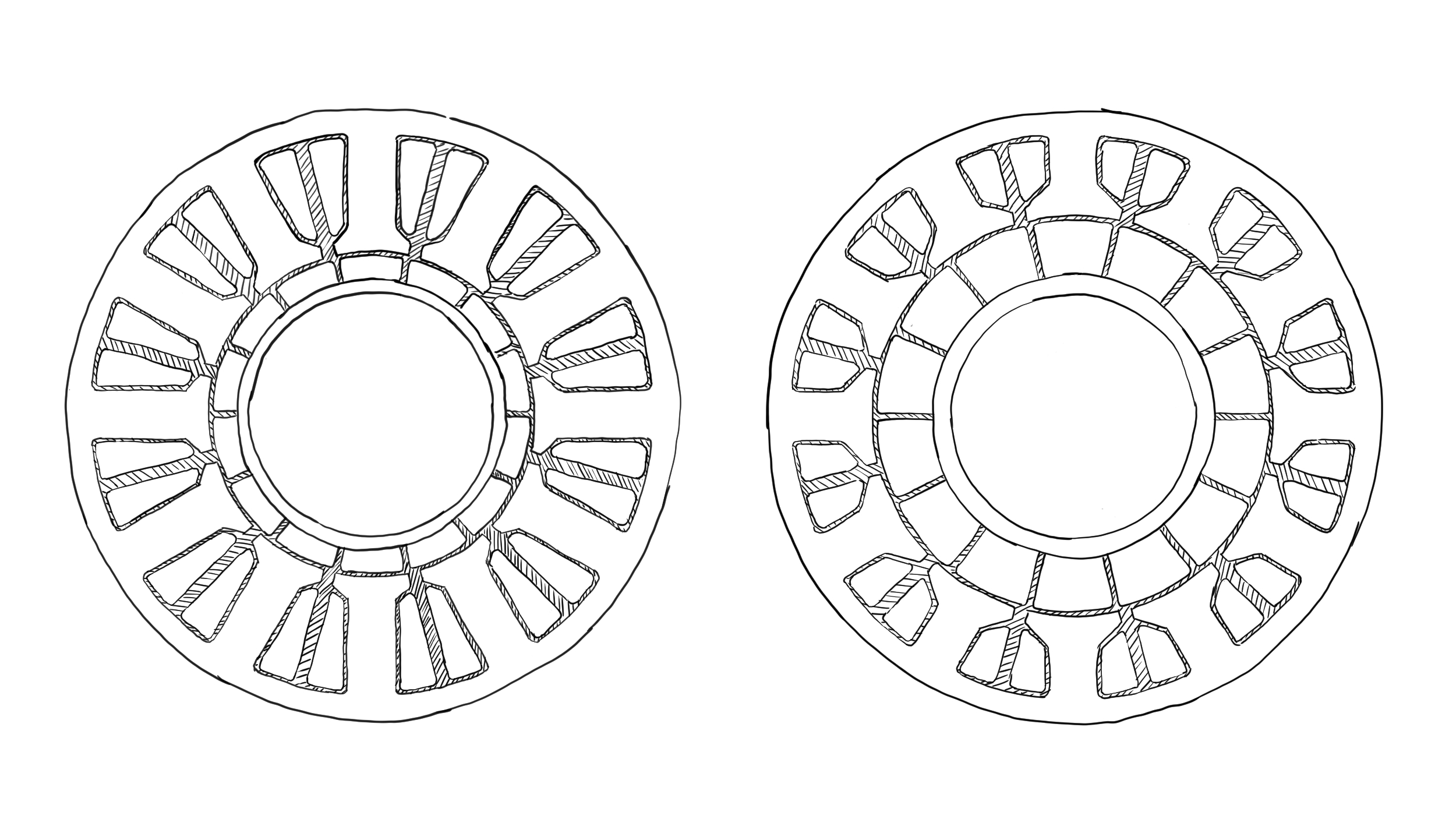
FoM như đã viết không nói gì về quán tính – trong một họ động cơ nhất định, FoM sẽ gần giống nhau và quán tính của bộ truyền động cho một mô-men xoắn và công suất nhất định sẽ gần như nhau, nhưng điều đó không có nghĩa là mọi động cơ với FoM đó đều có cùng quán tính. Ví dụ: hai động cơ được minh họa bên dưới có thể có cùng kích thước giới hạn và $K _{m}$ được chuẩn hóa, nhưng có quán tính rôto rất khác nhau.
Phân tích tỷ số truyền và quán tính ở đây giả định các bánh răng bằng 0 khối lượng, quán tính bằng không và hiệu suất hoàn toàn. Đây rõ ràng không phải là cách hoạt động của sự giảm tốc thực sự, mặc dù một số loại giảm tốc có thể đạt được tỷ số truyền cao với hiệu suất tương đối cao và quán tính tăng thêm ở mức tối thiểu.
Kết luận
- Hằng số động cơ có thể được chuẩn hóa theo khối lượng và bán kính để có được thước đo về mức độ hiệu quả mà động cơ tạo ra lực đối với một lượng vật liệu từ tính nhất định. Điều này rất hữu ích khi so sánh các động cơ có kích thước rất khác nhau.
- Quán tính phản xạ chủ yếu được xác định bằng công suất tiêu tán ở một mô-men xoắn nhất định, chứ không phải tỷ số truyền hoặc kích thước động cơ.
Tác giả: o4c